

公路路面的平整度直接决定通行安全与服务品质,传统监测手段效率低、数据片面、成本居高不下,难以适配现代公路养护的精准化、高效化需求。广西善图科技有限公司深耕空间信息测绘领域,创新引入无人机 LiDAR(激光雷达)核心技术,融合高精度数据采集、智能点云处理、科学平整度评价于一体,打造公路路面监测全流程解决方案,为公路养护决策提供精准数据支撑,让公路养护更科学、更高效、更省心!
依托先进的无人机 LiDAR 测绘系统,搭载高性能 Rigel VUX-1LR 激光扫描仪,实现低空、高速、高密度的路面三维信息采集,突破传统监测的空间与效率限制。本次技术验证选取新疆石河子市郊县级公路为实验区,无人机飞行高度 30m、飞行速度 5m/s,激光扫描频率达 550kHz,最终获取300~600pts/㎡的高密度激光脚点数据,扫描幅宽 85.7m,设备标称测绘精度 15mm,厘米级定位精度可精准捕捉坑槽、沉陷、裂缝、麻面等各类路面病害的三维特征。
|
扫描仪参数 |
规格 |
|
最小测量距离/ m |
5 |
|
激光脉冲频率/ kHz |
< = 820 |
|
测量精度/ mm |
15 |
|
测量精密度/ mm |
10 |
|
扫描速度/ ( scan / s) |
10~200 |
|
角度分辨率/ ( °) |
0.001 |
|
最大视场角/ ( °) |
330 |
|
回波信号强度/ bit |
16 |
数据采集同步搭配地面实测验证,采集 13 个地形特征点、52 个 9 类路面样本(坑槽、沉陷、裂缝等),通过 GPS-RTK 定位、直尺量测完成地面真值获取,为后续模型验证奠定坚实基础。
原始 LiDAR 点云数据经格式转换、多层滤波、精准分类、智能插值四大核心步骤处理,剔除噪声干扰,提取纯道路点云,最终构建高还原度的道路数字表面模型(DSM),实现路面三维形态的精准还原。
1. 点云滤波:通过噪声点人工删除、高程异常点(3 倍标准差阈值)过滤、±24° 扫描角筛选,结合 Axelsson 基于不规则格网的渐进加密算法完成地形滤波,分离地面与非地面点;
2. 点云分类与道路提取:结合无人机高分辨率正射影像(图 1),融合 LiDAR 数据反射强度与高程信息,交互式精准提取道路点云,排除周边植被、土壤等干扰;
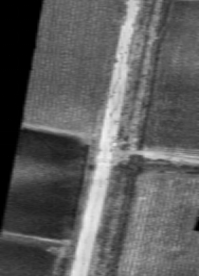
图 1 实验区高分辨率正射影像数据
3. DSM 模型构建:先通过不规则三角网生成三维地形结构(图2),再采用自然邻域插值法构建栅格大小0.05m的精细DSM模型(图3),该方法可避免虚假地形特征,保证模型表面平滑,高程精度达 1.6cm(表2),完美还原路面真实高程变化。


图2道路表面 TIN模型 图3 道路 DSM 模型
表2道路表面模型的高程误差统计结果
|
样点号实际深度/cm |
测量深度/cm |
误差/cm |
样点号 |
实际深度/cm |
测量深度/cm |
误差/cm |
|
|
1 |
9.3 |
6.3 |
- 3.0 |
8 |
3.4 |
6.1 |
2.7 |
|
2 |
9.9 |
9.8 |
- 0.1 |
9 |
5.1 |
7.9 |
2.8 |
|
3 |
7.2 |
9.8 |
2.6 |
10 |
7.7 |
7.5 |
- 0.2 |
|
4 |
4.2 |
4.1 |
- 0.1 |
11 |
8.4 |
10 |
1.6 |
|
5 |
5.6 |
6.6 |
1.0 |
12 |
7.6 |
8.1 |
0.5 |
|
6 |
8 |
6.6 |
- 1.4 |
13 |
7.5 |
7 |
- 0.5 |
|
7 |
8.1 |
8.3 |
0.2 |
|
|
|
|
|
|
最大误差 |
3.0 |
最小误差 |
0.1 |
RMSE |
1.6 |
|
选用国际通用、通用性强的国际平整度指数(IRI) 作为核心评价指标,基于四分之一车模型(图 4)构建振动微分方程,结合蒙特卡洛模拟优化计算参数,实现路面平整度的量化计算、空间可视化与五级质量分级,让路面质量状况一目了然。
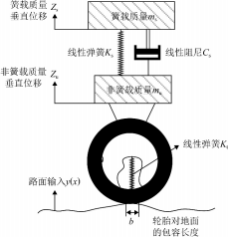
图 4四分之一车模型模拟系统
1. IRI 精准计算:以 80km/h 推荐车速为模拟基准,通过二阶振动微分方程递推求解,得到路面平整度的量化值(单位:m/km),该指数与车辆振动动态相关,可消除测量随机噪声,结果可跨设备、跨地区转换;
2. 参数优化确定:通过蒙特卡洛模拟分析采样间隔和测量单元长度对 IRI 计算误差的影响(图5),最终确定50mm最佳采样间隔、10m测量单元长度,在保证计算精度的同时兼顾运算效率;
3. 五级质量分级:参考《公路沥青路面养护技术规范》,将路面平整度划分为优、良、中、次、差五个等级,明确的 IRI 阈值为养护决策提供清晰标准(表3)。
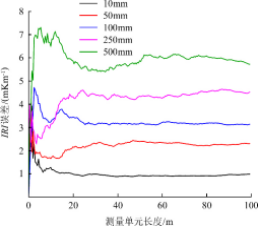
图5采样间隔和测量单元长度对 IRI 的计算误差影响
表 3路面平整度质量分级设置标准
|
平整度质量等级 |
优 |
良 |
中 |
次 |
差 |
|
IRI 范围 |
0.0~2.0 |
2.0~4.0 |
4.0~8.0 |
8.0 ~11.0 |
> 11.0 |
选取 9 类典型路面样本(大块状坑槽、小块状坑槽、石料暴露沉陷、裂缝、麻面等)共 52 个样本点,通过专家评分法(外观、表面粗糙度、车辙深度等 5 项指标)获取路面质量参考值,与 IRI 指数评价结果对比验证(图 6),最终得出技术整体评价精度 75%,Kappa 系数 0.65(图7),评价一致性良好。
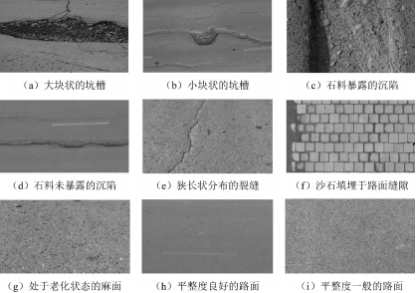
( a) ~ (i) 对应的 IRI 指数评价结果依次为差、差、差、次/ 差、次/ 差、次/ 差、中/ 次/ 差、良/ 中、良/ 中 ;
( a) ~ (i) 对应的参考评价结果依次为: 差、差、差、次/ 差、中/ 次、次、次/ 差、良、中
图 6典型路面样本及其平整度评价结果统计表
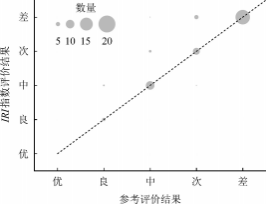
图7模型精度评价结果
验证结果表明,该技术对坑槽、沉陷等严重病害路面评价效果最优,对裂缝、沙石填埋路面误差较小,可精准识别路面主要病害类型与分布范围。以实验路段为例,通过技术统计得到各等级平整度路面分布比例路面质量以 “中” 为主(41.1%),“次”(27.4%)、“差”(24.9%)等级占比超 50%,直观反映路段需及时大修,为养护资源配置、养护优先级排序提供精准数据支撑。
1.高效全覆盖:无人机低空飞行,不受地形限制,可快速完成大范围公路监测,相比传统人工、车载方法,效率提升数倍;
2.高精度高维度:厘米级定位精度,获取路面三维点云数据,相比传统仅获取纵剖面信息的方法,数据更全面、还原更真实;
3.低成本易推广:相比激光断面仪等昂贵设备,无人机 LiDAR 系统成本更低,操作简便,适合低等级公路、乡村公路等大范围推广应用;
4.数据可视化:从三维模型到平整度分布、质量分级,全流程数据可视化呈现,养护重点一目了然,决策更科学;
5.全流程解决方案:提供从数据采集、点云处理、模型构建到平整度评价、养护建议的全流程服务,一站式解决公路路面监测需求。
无人机 LiDAR 路面监测技术,是低等级公路平整度监测的全新技术途径,可广泛应用于县级公路、乡村公路、园区道路等各类道路的日常监测、病害识别、养护规划。广西善图科技有限公司凭借专业的技术团队、成熟的技术方案、精准的监测服务,为公路管理部门、养护单位提供定制化的空间信息测绘解决方案,让每一条道路都能得到精准养护,让通行更安全、更顺畅!
从数据采集到精准评价,从技术创新到服务落地,善图科技始终以精准测绘、科学赋能为核心,用先进的空间信息技术助力公路养护行业升级,成为您身边可靠的公路养护技术合作伙伴!
合作咨询 | 技术交流 | 项目对接
欢迎各级政府、地勘单位、交通水利部门携手合作,共筑防灾减灾第一道防线!
广西善图科技有限公司
智慧遥感 · 精准防灾 · 科技守护安全
标签:滑坡监测 无人机 LiDAR技术 道路监测 善图科技 遥感技术
本文中部分监测成果示意图引用自论文《基于无人机LiDAR数据的公路路面监测和平整度评价方法研究》(作者:高仁等)。
图片仅作技术及成果展示使用,若相关权利人对图片使用有异议,请及时与广西善图科技有限公司联系,我们将第一时间处理删除。

遥感官方微信

遥感技术咨询
 桂公网安备 45030502000451号
桂公网安备 45030502000451号