
遥感成像激光雷达
遥感成像激光雷达
如果使用扩束激光(宽波束)发射光学天线,使目标均匀照射,采用CCD相机或焦平面阵列探测器接收,很容易获得目标的图像,而目标的距离通过激光调制波的相位来测量,即构成非扫描成像激光雷达。在距离选通中,照象机的快门打开的时间对于照射物体的激光发射时间是延时的,并且在很短的时间内打开,在这段时间内激光从物体反射回来.选通开关仅对激光脉冲反射光到达接收器时才打开.距离选通排除了后向散射光.这种方法,在于摄取到达相机的从物体反射回的光,并能屏蔽返回光中的散射光子.距离选通的成像系统采用脉冲激光器和能使像增强的选通ICCD器件或增强型焦平面器件.
同步扫描激光成像系统
激光器输出光束(窄波束)在靶面上以一维或二维的方式扫描.采用一维扫描方式,通过平台的运动获得二维信息,探测器是线阵器件.在光栅扫描方式中,光束沿二维扫瞄.探测器采面阵器件。
三维成像系统
条纹管成像激光雷达,使用脉冲激光器和时间分辨的条纹管接收器.激光束偏离轴线形成一个扇形光束,然后使得从光电阴极发出的光电子加速、聚焦、偏离.沿着垂直于扇形光束的轴上加一个扫描电压来及时控制光束,这样就能得到每一个激光脉冲的距离-方位图像,采用传统的CCD技术对这些距离-方位图像进行数字存储,使系统的脉冲重复频率与平台的前进速度同步。
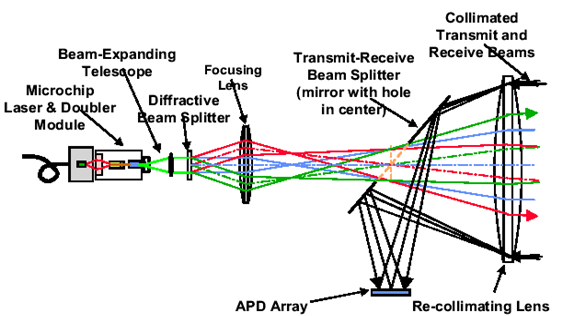
推帚式式激光成像,激光束被分束器分成多束,或叫阵列激光束,由飞行器实现一维扫描,由阵列激光束和阵列探测器本身结构实现另外一维扫描,这种方案,要采用激光分束器和多路回波并行接收技术。没有运动的扫描部件,其机械和光学设计更简单,机械失效的危险更小;推帚式激光扫描成像系统可在提高激光单脉冲能量的同时使激光器重复频率大大降低;同时可以根据需要设计多种地面采样图案,因而可以实现遥感时的非均匀测量,这对未来的自适应对地观测三维成像中特别有用。并且扫帚式激光雷达成像技术特别适合与推帚式光电、光谱成像等技术的匹配和图像的配准。下图是美国林肯实验室设计的推帚式成像系统。
目前成像激光遥感系发展较快,品种较多,大多在机载航空领域内使用。比如美国的optech公司ALTM3100EA,飞行高度80-3500m,最大扫描频率70Hz,发射激光重复频率30kHz-100kHz,最大偏转±25º,主要用来地形测绘。广西善图科技有限先公司

遥感官方微信
免费咨询:400-805-2218 桂公网安备 45030502000451号
桂公网安备 45030502000451号