
激光遥感测距离、速度、跟踪
激光遥感测距离、速度、跟踪
自从1960年人类利用红宝石研制出第一台激光器以来,激光以其单色性、高亮度和良好的方向性的特点,广泛的运用于测距,测速,大气研究,海洋研究,军事等领域。
最成熟和最经典的测距方法是脉冲测距和相位测距。
脉冲测距是通过直接测量激光脉冲的往返传播时间进行测距的。激光脉冲的往返传播时间由距离计数器测量。距离计数器的开门信号为激光主波采样信号,对应的关门信号为激光回波信号,激光脉冲往返时间根据计数器在开、关门信号之间及数值求的.
由上述测量原理可知,时间间隔测量精度主要取决于距离计数器的时间分辨率和主、回波出发点的一致性。距离计数器的时间分辨率由时标振荡器(晶振)频率决定
主、回波出发点的一致性取决于时间触发方式和激光脉冲波形稳定性。时间触发方式主要有恒定阈值触发方式、恒比定时触发方式和波型数字转换方式三种。
相位测距通过强度调制的连续光波在往返传播过程中相位变化来测量光束的往返传播时间,其计算公式如下,![]() (1);
(1);![]() 为调制光波的相位变化(rad),
为调制光波的相位变化(rad),![]() 为调制频率(Hz)
为调制频率(Hz) ![]() 为目标至参考点距离(m);c为光速(m/s) ;
为目标至参考点距离(m);c为光速(m/s) ;![]() 为调制波波长(m)。
为调制波波长(m)。
相位位移是以![]() 为周期变化的,因此有
为周期变化的,因此有![]() 式中N为相位变化整周期数;△n为相位变化非整周期数.
式中N为相位变化整周期数;△n为相位变化非整周期数.![]() ,式(1)表明,只要测出发射和接收光波的相位差,即可得到目标距离.因此相位测距可理解为以调制光波半波长为“测量尺度”的距离测量方法。
,式(1)表明,只要测出发射和接收光波的相位差,即可得到目标距离.因此相位测距可理解为以调制光波半波长为“测量尺度”的距离测量方法。
回波的多普勒频移量![]() 与目标的径向速度
与目标的径向速度![]() 成正比,因此,通过测量多普勒频移可得到目标的径向速度,激光多普勒频移可通过光外差技术测得,其原理和相干测风雷达相似。
成正比,因此,通过测量多普勒频移可得到目标的径向速度,激光多普勒频移可通过光外差技术测得,其原理和相干测风雷达相似。
![]()
近年来激光雷达借鉴了微波雷达的一些信号处理的方法,发展了脉冲压缩和连续波调频等激光调制和信号处理的体制测距。
由激光器分出一束宽脉冲光束,通过调制器将线性调频的激光束发射出去,回波信号与未经调制的固定频率本振光混频后,经匹配滤波器对信号进行压缩,变成一个幅度增大的窄脉冲,接下来和脉冲测距同样方法得到距离,它的特点是发射宽的光脉冲,回波处理后得到的是窄的电脉冲,目的在于缓解探测能力和距离分辨率的矛盾;连续波调频,是发射激光的频率随时间是线性(三角形)变化,经过一段时间的飞行,回波激光相对于本振激光就有了频率变化,两者相干混频,得到的中频信号,中频信号频率跟距离成正比,由频谱分析得到距离和速度。
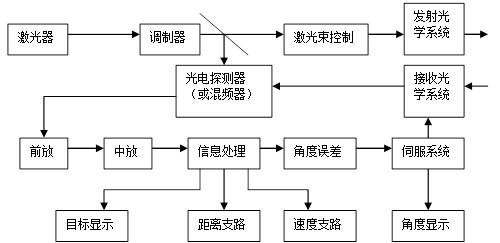
图1 测距、测速和跟踪综合系统
激光跟踪时,光电探测器采用四象限结构,即四块性能相同的扇型光电二极管各占一个象限拼成圆形结构。当回波光束的光斑均匀照射每一个象限时,方位和俯仰误差信号为零;当光斑位置偏离时,给出相应的方位和误差信号,通过伺服系统调整接收望远镜对准目标,实现目标跟踪。从雷达座上的经纬刻度就能读出目标的方位角和俯仰角。
美国机载门警TBM 激光雷达采用了人眼安全的激光波长。使用的是Nd:YAG激光泵浦KTP 0PO,它的输出波长为1.57μ m,脉冲能量为600mJ。激光接收机使用InGaAs APD和窄带滤光片。门警系统激光雷达负责导弹测距和跟踪。广西善图科技有限公司
由美国航空航天局Goddard空间飞行中心(GSFC)组织研发,于1996年11月7日升天的火星勘探号(Mars Global Surveyor,MGS)宇宙飞船携带了一个遥感设备MOLA一2。设备是一个激光测高仪,其距离分辨率37cm,能够以300m的间距分辨率探测火星表面的轮廓。MOLA一2系统的主要技术参数为:
|
轨道高度600km; |
|
重量25.85kg;功耗34.2W; |
|
激光器Nd:YAG@1064nm;脉冲宽度5ns; |
|
单脉冲能量48mJ 10Hz;光束发散角0.4mrad |
|
接收部分~500mm卡塞格林望远镜; |
|
视场角(FOV) 0.85mrad; |
|
光电转换器件硅雪崩光电二极管 |
|
电路部分微处理器80C86: |
|
时钟计数频率100MHz: |
|
滤波通道宽度20ns、60ns、180ns、540ns; |
|
距离测量分辨率37.5cm; |
|
数据率618bps(连续) |
|
精度指标垂直分辨率37.5cm; |
|
绝对精度<10m (取决于飞船轨道的重建精度); |

遥感官方微信
免费咨询:400-805-2218 桂公网安备 45030502000451号
桂公网安备 45030502000451号